









We can use Arduino IDE to Improve on the last article: How to Create an Easy Color Detection Bot: A Step-by-Step Guide!
Want the Arduino IDE code for the arduino aimbot? Click Here
The quest for precision and efficiency in aimbotting with color has reached new heights with the integration of Arduino Leonardo with games like AimLab or even Valorant! This article delves into the revolutionary techniques, exploring the optimization of code, utilization of OpenCV, and the implications of hardware-based mouse clicks.
Enhancing Code Efficiency with OpenCV Integration
The Colot project code receives a significant upgrade, incorporating key features for dynamic field of view adjustments and cursor movements aligned with individual computer configurations. The integration of OpenCV, an open-source computer vision library, turbocharges the performance by leveraging C++ capabilities. The resulting code executes faster and more efficiently.
Python Code to Detect Color
def detect_color(size=1):
global bot
bot = True
while bot:
take_screenshot()
image = cv2.imread('screenshot.jpg')
# define the list of boundaries
# B, G, R
close_points = []
# loop over the boundaries
#lower = red[0]
#upper = red[1]
# create NumPy arrays from the boundaries
lower = np.array([160, 140, 0], dtype="uint8")
upper = np.array([255, 255, 45], dtype="uint8")
# find the colors within the specified boundaries and apply
# the mask
mask = cv2.inRange(image, lower, upper)
#output = cv2.bitwise_and(image, image, mask=mask)
#cv2.imwrite("res1.png", np.hstack([image, output]))
ret, thresh = cv2.threshold(mask, 40, 255, 0)
contours, hierarchy = cv2.findContours(thresh, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_NONE)
cnt = contours
cv2.drawContours(image, cnt, -1, (255, 0, 0), 2, cv2.LINE_AA)
#contours, hierarchy = cv2.findContours(mask, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_NONE)
for c in cnt:
if cv2.contourArea(c) > size:
# print(cv2.pointPolygonTest(c, pt, True))
# close_poly.append(cv2.pointPolygonTest(c, pt, True))
x1, y1, w1, h1 = cv2.boundingRect(c)
# print((x1 + (w1 / 2)), (y1 + (h1 / 2)))
close_points.append((round(x1 + (w1 / 2)), round(y1 + (h1 / 2))))
# print("closest point:", min(close_poly))
if len(contours) != 0:
pt = (960, 540) # screen center and crosshair position #win32api.GetCursorPos()
#print("pt x and y:", pt)
closest = close_points[scipy.spatial.KDTree(close_points).query(pt)[1]]
#print(closest)
cv2.circle(image, (closest[0], closest[1]), radius=3, color=(0, 0, 255), thickness=-1)
cv2.line(image, pt, (closest[0], closest[1]), (0, 255, 0), 2)
#cv2.imwrite('res_marked.png', image)
print("desintation:",closest[0], closest[1])
mouse_action(closest[0], closest[1], button='left')What does the code do?
- Initialization:
- Sets a global variable
bottoTrue. - Enters a while loop, which runs as long as
botremainsTrue.
- Sets a global variable
- Image Processing:
- Captures a screenshot using the
take_screenshot()function. - Reads the captured screenshot using OpenCV’s
cv2.imread. - Defines upper and lower boundaries in terms of BGR (Blue, Green, Red) values to isolate the desired color.
- Creates a mask using
cv2.inRange()based on the defined color boundaries. - Thresholds the mask to create a binary image, separating the desired color from the background.
- Identifies contours within the thresholded image using
cv2.findContours().
- Captures a screenshot using the
- Contour Analysis:
- Filters contours based on a specified minimum area (
size). - For each qualifying contour:
- Determines the centroid coordinates.
- Appends the centroid coordinates to
close_points.
- Filters contours based on a specified minimum area (
- Point Identification:
- Defines a reference point (
pt), which represents the center of the screen or a crosshair position. - Finds the closest centroid to this reference point using a KDTree algorithm from
scipy.spatial. - Marks the identified closest point with a circle and a line in the image.
- Defines a reference point (
- Mouse Action:
- Calls a
mouse_actionfunction with the coordinates of the identified closest point, effectively simulating a mouse action (e.g., a left click) at that location.
- Calls a
- Output and Loop Control:
- Prints the coordinates of the identified closest point.
- Continues the loop as long as there are contours detected in the image.
This code snippet essentially conducts color detection, tracks specific color centroids within the screenshot, finds the closest centroid to a predefined point, and triggers a simulated mouse action based on that identified point.
Leveraging OpenCV for Enhanced Performance
OpenCV, with its contours and color detection capabilities, significantly augments the script’s efficiency. By detecting and isolating colors within the blue spectrum, contours become distinctly visible. This color-based approach, compared to traditional methods, enhances contour visibility and facilitates accurate identification of the nearest contour to the crosshair, optimizing targeting in games like AimLab or even Valorant with the right colouring!
- Contours in OpenCV: Contours are outlines or boundaries of objects in an image. OpenCV’s contour detection capabilities allow it to identify these boundaries by finding continuous points along the object’s edge. This is vital for shape analysis, object detection, and recognition within images.
- Color Detection and Isolation: OpenCV’s color detection capabilities involve specifying a range of colors within an image. In the context mentioned, the script employs color detection to isolate specific hues within the blue spectrum. This means defining upper and lower bounds of blue in terms of RGB (Red, Green, Blue) values.
- Enhancing Contour Visibility: By isolating colors within the blue spectrum, the script focuses solely on contours or shapes that exhibit those particular shades of blue. This color-based approach allows for clearer and more distinct delineation of contours associated with the detected blue color. It filters out extraneous colors, making the contours stand out prominently against the background.
- Overall Impact on Efficiency: The integration of OpenCV’s color detection and contouring capabilities significantly enhances the script’s efficiency. It minimizes computational load by honing in on relevant features, thus optimizing processing time and resource utilization. Additionally, the clarity in contour detection allows for more accurate subsequent actions or analyses based on these contours, contributing to the overall efficiency of the script’s functionality.
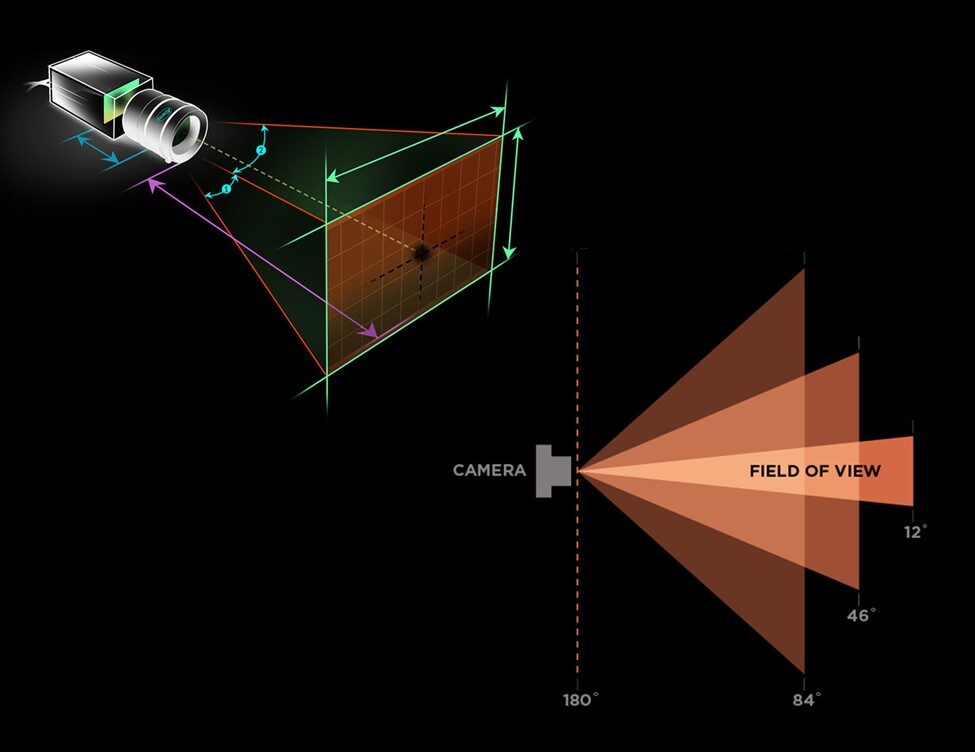
Unveiling Field of View (FOV) Adjustment and Mouse Movements
The introduction of the FOV variable in the code dictates the mouse’s movement based on its current position and proximity to the nearest object. By adjusting the FOV multiplier, users gain precise control over the mouse’s movement, refining targeting accuracy within the gaming environment.
Python code for FOV adjustment
def getPointOnLine(x1, y1, x2, y2, n):
global FOV, num_steps
"""
Returns an (x, y) tuple of the point that has progressed a proportion ``n`` along the line defined by the two
``x1``, ``y1`` and ``x2``, ``y2`` coordinates.
This function was copied from pytweening module, so that it can be called even if PyTweening is not installed.
"""
print(n)
x = (((x2 - x1) * (1 / (num_steps)))) * FOV
y = (((y2 - y1) * (1 / (num_steps)))) * FOV
return (str(math.ceil(x)) + ":" + str(math.ceil(y)))This Python function, getPointOnLine, calculates the coordinates of a point at a given proportion along a line defined by two sets of coordinates (x1, y1) and (x2, y2). It takes into account the proportion n along this line and returns an (x, y) tuple representing the calculated point.
The function starts by initializing and accessing global variables FOV and num_steps. These variables represent the Field of View and the number of steps in a calculation or animation sequence. Using linear interpolation principles, the function calculates the coordinates of the point. It multiplies the difference between the x-coordinates (x2 – x1) and the y-coordinates (y2 – y1) by the inverse of the num_steps.
This operation scales the step taken along the line based on the FOV, which is then multiplied by the proportion n. The resulting x and y values are returned as a string in the format x:y, rounded up using math.ceil(). This format represents coordinates or a specific output format required for navigating the mouse movement.
The print(n) statement serves as a debug or informational line, displaying the proportion n passed into the function.
Overall, the function interpolates between two points based on a given proportion n, factoring in the global FOV and num_steps variables to determine the position along the line, and returns the coordinates in a specific string format.
Arduino IDE – Streamlining Hardware-Based Mouse Clicks Using Arduino Leonardo
A groundbreaking approach emerges as the Arduino Leonardo device is employed to simulate hardware-based mouse clicks. This departure from virtual clicks leads to more seamless and accurate in-game actions, enhancing overall gaming performance and ensuring undetected for games (Valorant) with higher anti-cheat systems.
Python code for aimbot movement and clicks
def _mouseMoveDrag(x, y, tween=linear, ard=None, winType=None):
global previousList, lastList, num_steps
if winType == 'FPS':
startx, starty = (960, 540)
else:
startx, starty = _position()
arduino = ard
#x = int(x) if x is not None else startx
#y = int(y) if y is not None else starty
# If the duration is small enough, just move the cursor there instantly.
steps = [(x, y)]
if FPS:
num_steps = 10
else:
num_steps = 30
#print('num_steps:', num_steps)
#print("start:", startx, starty)
steps = [getPointOnLine(startx, starty, x, y, tween(n / num_steps)) for n in range(num_steps + 1)]
#print("Final Coords sent:", steps)
# Making sure the last position is the actual destination.
if not FPS:
steps.pop()
steps.pop(0)
steps = str(steps)
print("Final Coords sent:", steps)
arduino.write(bytes(steps, 'utf-8'))
def getLatestStatus(ard=None):
status = 'Nothing'
while ard.inWaiting() > 0:
status = ard.readline()
return status
def arduino_mouse(x=100, y=100, ard=None, button=None, winType=None):
#
#print("arduino mouse is:", button)
#if button == None:
_mouseMoveDrag(x, y, tween=linear, ard=ard, winType=winType)
time_start = time.time()
stat = getLatestStatus(ard)
print(stat)
print(time.time() - time_start)
if button == None:
time.sleep(0.01)
else:
time.sleep(0.05)
c = random.uniform(0.02,0.05)
#time.sleep(0.05)
#print("passed arduino mouse is:", button)
if button == 'left':
ard.write(bytes(button, 'utf-8'))
stat = getLatestStatus(ard)
print(stat)
time.sleep(c)
if button == 'right':
ard.write(bytes(button, 'utf-8'))
stat = getLatestStatus(ard)
print(stat)
time.sleep(c)This part of the python script consists of three functions: _mouseMoveDrag, getLatestStatus, and arduino_mouse, designed to manage mouse movements, interaction via an Arduino device, and retrieving status updates.
- _mouseMoveDrag Function:
- This function orchestrates mouse movements based on given coordinates
(x, y). It employs linear interpolation (tween) to smoothly navigate from the current position to the target coordinates. - It prepares a series of intermediary steps (based on the
num_stepsvariable) between the current and target positions usinggetPointOnLine. This generates a path of coordinates that simulates a gradual mouse movement. - The resulting coordinate steps are converted to a string format and sent via an Arduino device using
arduino.write().
- This function orchestrates mouse movements based on given coordinates
- getLatestStatus Function:
- This function retrieves the latest status or response from an Arduino device. It continuously checks for available data in the Arduino’s buffer (
ard.inWaiting()), reading and storing the latest status usingard.readline().
- This function retrieves the latest status or response from an Arduino device. It continuously checks for available data in the Arduino’s buffer (
- arduino_mouse Function:
- It orchestrates the mouse movement by calling
_mouseMoveDragand manages interactions with an Arduino device. - Depending on the
buttonparameter (which might represent left or right mouse clicks), it writes the corresponding command to the Arduino (ard.write(bytes(button, 'utf-8'))) and retrieves the updated status from the Arduino device. - The function introduces slight delays (
time.sleep()) for synchronization and manages the response time for the Arduino (time.time()).
- It orchestrates the mouse movement by calling
Overall, this script integrates mouse movement simulation with Arduino interactions, allowing for gradual mouse movements and managing interactions via an Arduino device while monitoring and retrieving status updates from the device. The functions coordinate a seamless interaction between simulated mouse actions and an external Arduino device.
Overcoming Sensitivity and FOV Challenges
Challenges can arise with sensitivity adjustments within the game client affecting FOV dramatically. To mitigate this discrepancy, the FOV multiplier within the script is adaptable, ensuring synchronization between in-game settings and the automated script.
Transitioning to Arduino Leonardo for Hardware Emulation
The article transitions into the utilization of Arduino Leonardo for emulating hardware mouse movements, paving the way for enhanced gaming experiences. It outlines the steps for acquiring the necessary software, initiating the setup, and integrating the code into the Arduino environment for seamless execution.
Arduino IDE code
#include <Mouse.h>
int buttonPin = 9; // Set a button to any pin
void setup() {
Serial.begin(115200);
Serial.setTimeout(1);
// pinMode(buttonPin, INPUT); // Set the button as an input
digitalWrite(buttonPin, HIGH); // Pull the button high
delay(1000); // short delay to let outputs settle
Mouse.begin(); //Init mouse emulation
}
void loop() {
if (Serial.available() > 0) {
String input = Serial.readStringUntil('\n'); // Read the serial input until newline character
input.trim(); // Remove leading and trailing spaces
//Serial.println(input);
// Check if the input is a valid format
if (input == "left") {
Mouse.click(MOUSE_LEFT);
}
if (input == "right") {
Mouse.click(MOUSE_RIGHT);
}
else
{
//if (input.startsWith("[") && input.endsWith("]")) {
input.remove(0, 1); // Remove the leading '['
input.remove(input.length() - 1); // Remove the trailing ']'
//Serial.println(input);
char charArray[input.length() + 1];
input.toCharArray(charArray, sizeof(charArray));
//Serial.println("char array");
//Serial.println(charArray);
char* pair = strtok(charArray, ", ");
//Serial.println(pair);
while (pair != NULL) {
String pairStr = pair;
//Serial.println(pair);
//pairStr.trim();
pairStr.remove(0, 1); // Remove the leading '('
pairStr.remove(pairStr.length() - 1); // Remove the trailing ')'
int commaIndex = pairStr.indexOf(":");
if (commaIndex != -1) {
String xStr = pairStr.substring(0, commaIndex);
String yStr = pairStr.substring(commaIndex + 1);
int x = xStr.toInt();
int y = yStr.toInt();
//Serial.println(x);
//Serial.println(y);
float lim = (float)1 + ((float)100/(float)254);
//Serial.println(lim);
// Move the mouse to the specified coordinates
int finx = round((float)x * (float)lim); // adjust for 127 limitation of arduino
int finy = round((float)y * (float)lim); // adjust for 127 limitation of arduino
//Serial.println(finx);
//Serial.println(finy);
Mouse.move(finx, finy, 0);
//delay(1); // Add a delay to prevent rapid movements
}
pair = strtok(NULL, ", ");
}
}
}
Serial.flush();
//Serial.End();
//Serial.begin(115200);
}This piece of Arduino IDE code enables it to receive commands through the Serial Monitor to emulate mouse movements and clicks. Let’s break it down step by step:
- Arduino Ide Libraries and Variables:
#include <Mouse.h>: This includes the Mouse library, allowing the Arduino IDE to emulate mouse functions.
- Setup Function:
Serial.begin(115200);: Initializes serial communication at a baud rate of 115200.Serial.setTimeout(1);: Sets the timeout for Serial input to 1 millisecond.digitalWrite(buttonPin, HIGH);: Sets the specifiedbuttonPinto a high state, effectively pulling it high.delay(1000);: A delay of 1000 milliseconds (1 second) to allow the outputs to settle.Mouse.begin();: Initializes mouse emulation, allowing the Arduino to act as a mouse.
- Loop Function:
- It continuously checks for serial input (
if (Serial.available() > 0)). - Reads the input until it encounters a newline character (
'\n') and removes leading/trailing spaces. - If the input is
"left"or"right", it emulates a left or right mouse click respectively usingMouse.click(MOUSE_LEFT)orMouse.click(MOUSE_RIGHT). - If the input follows a specific format like
[x:y, x:y, ...](wherexandyare integers separated by a colon), it processes the coordinates:- Removes square brackets and splits the input into pairs of x and y coordinates.
- Converts the string coordinates into integers and scales them to adjust for a limitation (seems to be due to Arduino’s range limitation).
- Moves the mouse to the specified coordinates using
Mouse.move(finx, finy, 0). - Want to know more about substring and string splitting? heres: splitting a string in arduino !
- It continuously checks for serial input (
- Other Notes:
- The code uses
Serial.flush()to clear the serial input buffer. - There are commented-out lines related to serial communication, likely used for debugging or testing purposes.
- The code uses
Overall, this code turns an Arduino into a mouse emulator that can receive commands through the Serial Monitor to move the mouse cursor or simulate mouse clicks.
Arduino Hardware: Leonardo
The Arduino Leonardo is a microcontroller board based on the ATmega32u4 chip. It’s part of the Arduino family and used for Arduino Ide but stands out due to its unique capabilities compared to other Arduino boards. Here’s what sets it apart and what it’s commonly used for:
USB Connectivity and Native HID Support:
- The Leonardo has built-in USB communication capabilities and supports USB HID (Human Interface Device) protocol directly on the chip.
- Unlike some other Arduino boards that require additional hardware or libraries to emulate keyboard or mouse functions, the Leonardo can act as a mouse, keyboard, or other HID devices without additional components. This is due to its native USB capabilities.
Microcontroller with Various I/O Pins:
- It features digital and analog I/O pins, similar to other Arduino boards, allowing it to interface with a wide range of sensors, actuators, and other devices.
- The board provides PWM (Pulse Width Modulation) pins, analog input pins, digital pins, and communication ports like UART, SPI, and I2C, enabling it to interact with various components and devices.
Integrated Development Environment (IDE) Compatibility:
- The Arduino Leonardo is programmed using the Arduino IDE, making it easy to write and upload code to the board.
- It’s compatible with the vast array of Arduino libraries and community-supported resources available for different sensors, modules, and functionalities.
Applications and Use Cases:
- Due to its native USB HID support, the Leonardo is commonly used in projects that require keyboard or mouse emulation, such as creating custom input devices, game controllers, keyboard shortcuts automation, and more.
- Its versatility and ease of use make it suitable for various applications in robotics, automation, interactive installations, and educational purposes where USB interfacing or human-computer interaction is required.
In summary, the Arduino Leonardo stands out for its native USB capabilities and ability to emulate HID devices without additional components, making it an excellent choice for Arduino Ide projects requiring keyboard or mouse emulation, interactive devices, and a wide range of embedded applications.
Where to buy Arduino Leonardo
You can purchase an Arduino Leonardo from various online and offline retailers. Here are some popular options:
Buy from the Slyautomation Store! for $17.99 AUD (Australian Dollars)
- Official Arduino Store: The official Arduino online store is a reliable source to purchase genuine Arduino boards and accessories. You can visit their website and check for the availability of the Arduino Leonardo.
- Online Retailers:
- Amazon: Often, Arduino boards, including the Leonardo, are available on Amazon from different sellers: KEYESTUDIO Leonardo R3 Microcontroller Development Board with USB Cable Kit for Arduino Project
- Adafruit: Adafruit is known for selling Arduino boards, components, and accessories. They might have the Leonardo in stock.
- SparkFun: Another popular electronics retailer that often carries Arduino boards, including the Leonardo.
- Aliexpress: Sells generic Arduino boards, including the Leonardo: Leonardo R3 Development Board + USB Cable ATMEGA32U4
- Local Electronics Stores:
- Check with local electronics stores or hobbyist shops that specialize in microcontrollers, electronics, or DIY kits. They might have Arduino boards available for purchase.
When buying an Arduino board, it’s essential to ensure that you’re purchasing from a reputable seller to get a genuine product. Check reviews, seller ratings, and product descriptions to make an informed decision.
Setting up and Running Arduino
To get an Arduino Leonardo up and running, follow these steps:
- Download Arduino IDE: Visit the Arduino website and download the Arduino IDE suitable for your operating system.
- Install the Arduino IDE: Follow the installation instructions provided for your specific operating system.
- Connect your Arduino Leonardo: Use a USB cable to connect the Leonardo to your computer.

- Install Drivers (if necessary): Most modern operating systems will automatically install the necessary drivers for the Leonardo. However, if your computer doesn’t recognize the board, you might need to install drivers manually. You can find these drivers on the Arduino website.
- Open Arduino IDE: Launch the Arduino IDE on your computer.
- Select the Board: Go to
Tools > Board, and from the dropdown menu, select “Arduino Leonardo.” - Choose the Port: Go to
Tools > Portand select the port that corresponds to your Arduino Leonardo. The correct port should be labeled with the Arduino board’s name. - Upload a Test Sketch: Open a basic sketch to test the functionality of your board. For example, try uploading the “Blink” sketch which blinks an LED on the board.
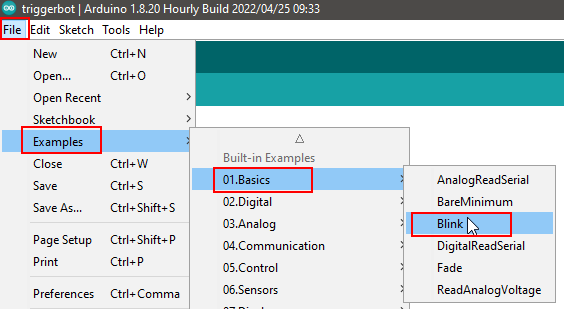
- Go to
File > Examples > 01.Basics > Blink.- Review the code, if needed.
- Click the right arrow icon (Upload) in the Arduino IDE to compile and upload the sketch to your Leonardo.

- Verify Connection: If everything is set up correctly, you should see the onboard LED blinking. If not, double-check the connections and selected settings.
If the test sketch works without issues repeat the same steps but instead of the code for Blink, create a new sketch with the same settings and paste the code mentioned in Arduino IDE code. Then run the python code while using aimlab!
This video shows the whole process and goes into visual details of the project:
Peeking into the Future: Valorant Triggerbot Sneak Peek
Additionally, a glimpse into the future reveals the exploration of Triggerbot functionalities in Valorant using similar techniques showcased earlier. This sneak peek hints at further advancements in gaming automation, teasing the potential for enhanced gameplay experiences.
Conclusion: Unlocking the Future of Gaming Automation
In conclusion, the amalgamation of Arduino Leonardo and advanced coding techniques reshapes gaming automation paradigms. The optimization of scripts, integration of hardware-based mouse clicks, and the promise of Triggerbot functionalities signal a promising future for gamers seeking precision and efficiency in gaming.
For more in-depth tutorials and upcoming developments, click on the banner below, subscribe to the channel and stay tuned for future gaming automation innovations.
Online Retailers:
- Amazon: Explore Amazon for a variety of Arduino Leonardo boards, including options like KEYESTUDIO Leonardo R3 Microcontroller Development Board with USB Cable Kit.
- Adafruit: Adafruit is a trusted source for Arduino boards, components, and accessories, and they might have the Arduino Leonardo in stock.
- SparkFun: Check SparkFun, a popular electronics retailer, for a selection of Arduino boards, including the Leonardo.
- Aliexpress: Aliexpress offers generic Arduino boards, such as the:
| Item | Image | Cost ($USD) |
| Leonardo R3 Development Board + USB Cable ATMEGA32U4 |  | $5.72 |
| Arduino USB Host Shield |  | $5.31 |
| Arduino Leonardo R3 | | $5.72 |
| Soldering Iron Kit |  | $18.54 |
Check out the aimbot in valorant using these methods! https://www.slyautomation.com/blog/valorant-aimbot-with-color-detection-with-python/




It’s the best time to make some plans for the longer term and it’s time to be happy.
I’ve learn this submit and if I may just I want to counsel you few
interesting things or advice. Maybe you can write next articles regarding this article.
I desire to read even more things about it!
Also visit my website :: mobileslot.Evenweb.Com
Your site visitors, especially me appreciate the time and effort you have spent to put this information together. Here is my website FQ7 for something more enlightening posts about Airport Transfer.
Superb post but I was wanting to know if yoou could write a litte more on this
subject? I’d be very thankful iff you could elaborate a little bit more.
Many thanks!
Feel free to visit my homepage … Swolesource.com
With havin so much written content do you ever run into any problems of plagorism or
copyright infringement? My blog has a lot off exclusive content I’ve either created myself or outsourced but it looks like a lot off iit is popping it
up all over the internet without my agreement. Do you khow any
methods to help prevent conbtent from being rippeed off?
I’d certainly appreciate it.
Take a look at my web-site :: http://Cheapbooks.Cc
Thhanks for another magnificent article.
Where else may anyone get that type of info in such aan ideal mannerr
of writing? I’ve a presentation subsequent week, and I’m on the look for such info.
Here is my blog post :: http://Www.Hotboat.com
Hi there colleagues, how is all, and what youu would like to sayy about this post, in myy
view its in fat awesome in support of me.
Heere is my blog post; Oople.Com
Great post.
My blog Angeline
Howdy would you mind sharing which blog platform you’re using?
I’m looking to strt my own blog soon but I’m having a
difficult time selecting between BlogEngine/Wordpress/B2evolution and Drupal.
Thhe reason I ask is because your design and style seems different then most blogs andd I’m looking ffor something unique.
P.S Sorry for being off-topic but I had to ask!
My blog … Mail.Bjoernvold.Com
You’ve made some really good points there. I looked on tthe internet for
more information about the issue and found most individuals will go along with your views on this web site.
My blog post Alda
I am extremely impressed with your writing skills and alsxo with the
layout on your weblog. Is this a pqid theme or did you modify it yourself?
Anyway keedp uup the excellent quality writing, it is rare to see a
great blog like this onee these days.
my homepage; Moshe
I enjoy looking through an article that will make people think.
Also, thank you for allowing me to comment!
my web site :: Natisha
I’m very happy to discover this website. I need to to thank
you for your time for this particularly fantastic read!!
I definitely appreciated every little bit of itt and i also have you book-marked to check out new stuff on your website.
Look aat myy website – forum.d-Dub.com
Thanks in favor off sharing such a nice idea, paragraph is fastidious, thats why i have
rsad it completely
Here is my website – http://Www.Rebreatherworld.Com
Since the admiun of this web site is working, no uncertainty very rapidly it will be renowned, due to its quality
contents.
Review my website: http://Www.oople.com
Howdy great blog! Does running a blog like this take a massive amount work?
I have very little expertise in compute programming however I was hoping to start
my own blog in the near future. Anyhow, should youu have any
idewas or techniques for nnew blopg owners pllease share.
Iunderstand this is ooff topic but I simply needed to ask.
Kudos!
Stop by my blog post :: Alejandro
Good day! I know this is kinda off topic but I was wondering if you knew where I
couyld find a captcha plugin for my comment form?
I’m using the same blog platform as yours annd I’m having trouble findin one?
Thanks a lot!
My page Monty
Appreciating the time and energy you put into your site and detailed information you present.
It’s good to come accross a blog every once inn a while that isn’t the same outdated rehashed material.
Excellent read! I’ve bookmarked yoour site aand I’m including youjr RSS feeds to my
Google account.
Have a look at my web site :: adtgamer.com.Br
Wondefful blog! I ound it while surfing around on Yahoo News.
Do you have any tips on how to get listed in Yahoo News? I’ve been trying for a
wwhile but I never sewem to get there! Cheers
Here is mmy webpage Himeuta.org
Wonderful work! This is the type of info that are supposed tto be shared acros the web.
Diisgrace on Google for now not positioning this post upper!
Come on over and consult witth my web site . Thanks =)
Feeel free to visit my pge – webnews.Textalk.com
Spot on with this write-up, I truly believe
this website needs a lot more attention. I’ll probably be returning to see more, thanks for the advice!
Here is my website :: Therese
I loved your blog. Want more.
Appreciate you sharing, great blog post.Really thank you! Will read on…
Thanks-a-mundo for the article post.Really thank you! Awesome.
Hey, thanks for the post.Much thanks again. Awesome.
Very neat post.Really thank you! Really Cool.
Great, thanks for sharing this post.Thanks Again. Cool.
I loved your article post.Really thank you!
Muchos Gracias for your blog article.Much thanks again.
I cannot thank you enough for the article post.Really looking forward to read more. Will read on…
Awesome post.Thanks Again. Really Cool.
I appreciate you sharing this article.Really thank you!
Muchos Gracias for your blog.Much thanks again. Fantastic.
I really like and appreciate your post.Really thank you! Much obliged.
I truly appreciate this blog post.Thanks Again. Much obliged.
I appreciate you sharing this article.Thanks Again. Awesome.
Thank you ever so for you blog article.Really looking forward to read more.
Thank you, I have recently been looking for information approximately this topic for a long time and yours is the best I’ve found out so far. However, what about the bottom line? Are you certain concerning the source?
dr rajter ivermectin ivermectin for scabies in humans
I wanted to thank you for this fantastic read!! I definitely loved every little bit ofit. I’ve got you book marked to check out new things youpost?Also visit my blog: mpc-install.com
do side effects of amlodipine go away lisinopril and amlodipine
This is one awesome article post.Really looking forward to read more. Much obliged.
Fantastic article post.Much thanks again. Keep writing.
Major thanks for the article.Thanks Again. Awesome.
Wow, great blog article.Really thank you! Keep writing.
Thanks again for the blog.Really thank you! Awesome.
Thanks for sharing, this is a fantastic article.Thanks Again. Keep writing.
Thanks-a-mundo for the article post.Really looking forward to read more. Much obliged.
Thanks a lot for the article post. Really Cool.
Thanks a lot for the blog article. Want more.
Im thankful for the blog post. Cool.
You bear an extraordinary expertise. Your authoring abilities are undoubtedly impressive. Many thanks for submitting content online and instructing your subscribers.
Very good article. Awesome.
Say, you got a nice blog article.Really looking forward to read more. Really Cool.
Thanks a lot for the blog.Really looking forward to read more. Cool.
Thanks for the article.Thanks Again.
I appreciate you sharing this article post.Thanks Again. Want more.
Thank you ever so for you blog post.Much thanks again. Cool.
Very good written post. It will be beneficial to everyone who employess it, including me. Keep up the good work – for sure i will check out more posts.
Great post.Thanks Again. Much obliged.
canadian pharmacy ed doctors – ed treatment natural
Really enjoyed this article post.Much thanks again. Awesome.
You made a few nice points there. I did a search on the issue and found most folks will go along with with your blog.
Great blog article.Really looking forward to read more. Much obliged.
stromectol in canada stromectol – ivermectin 1 cream
Really appreciate you sharing this blog article.Much thanks again. Much obliged.
over the counter erectile dysfunction medication – strongedpl.com ed pills that work
Thẳng đá Bóng Ngày Hôm Naybang xep hang bong da viet namNếu cứ chơi như cách vừa đè bẹp Everton cho tới 3-1 trên sân khách hàng
Im thankful for the article. Will read on…
Thanks so much for the blog article. Keep writing.
Major thankies for the blog post.Much thanks again. Great.
Really appreciate you sharing this blog post. Cool.
I loved your post. Awesome.
I appreciate you sharing this article post.Thanks Again.
Very nice post. I just stumbled upon your weblog and wished to mention that I’ve really loved browsing your blog posts.
After all I’ll be subscribing on your rss feed
and I am hoping you write again soon!
Hello my family member! I wish to say that this article is awesome, greatwritten and come with approximately all important infos.I would like to look more posts like this .
I’ll right away grasp your rss feed as I can not find your e-mail subscription hyperlink or e-newsletter service. Do you’ve any? Kindly allow me realize so that I may subscribe. Thanks.
Hmm is anyone else encountering problems with the imageson this blog loading? I’m trying to figure outif its a problem on my end or if it’s the blog. Any responses would be greatly appreciated.
I cannot thank you enough for the blog post. Will read on…
Superb write ups. Thanks a lot.ivy league college essays help dissertation top ghostwriters
order tetracycline online: order tetracycline onlinetetracycline generic
Thanks for sharing, this is a fantastic blog.Really looking forward to read more. Keep writing.
Looking forward to reading more. Great blog article.Really thank you! Awesome.
Very informative article.
Great blog post.Much thanks again. Fantastic.
Im grateful for the blog post.Much thanks again.
Really appreciate you sharing this blog.Really looking forward to read more. Keep writing.
I think this is a real great article post.Really thank you! Awesome.
I enjoy looking through an article that can make men and women think. Also, many thanks for allowing me to comment! Sisile Jose Ame
careprost paid with paypal careprost amazon careprost canada reviews
A big thank you for your article post.Much thanks again. Cool.
Hello, you used to write excellent, but the last few posts have been kinda boring… I miss your tremendous writings. Past several posts are just a bit out of track! come on!
I savor, cause I discovered just what I used to be looking for. You have ended my four day long hunt! God Bless you man. Have a great day. Bye
Thank you for the auspicious writeup. It in fact was a amusement account it. Look advanced to far added agreeable from you! However, how could we communicate?
I wanted to thank you for this great read!! I absolutely enjoyed every bit of it. I have got you book-marked to check out new things you postÖ
Really informative article. Will read on…
Very informative article.Really looking forward to read more.
Really appreciate you sharing this blog post.Really looking forward to read more. Fantastic.
You can find a wide range of trusted pharmaceutical products to suit your health requirements.
Our online pharmacy ensures quick and safe shipping to your location.
Every item is sourced from trusted suppliers to ensure effectiveness and reliability.
Easily explore our catalog and get your medicines with just a few clicks.
Got any concerns? Pharmacy experts is ready to assist you at any time.
Prioritize your well-being with affordable e-pharmacy!
https://www.storeboard.com/blogs/health/how-kamagra-jelly-surprised-me-on-an-unexpected-day/6074569
Thanks again for the blog post.Really thank you! Will read on…
Hi there! I’m at work browsing your blog from my new apple iphone!Just wanted to say I love reading your blog and lookforward to all your posts! Keep up the superb work!
Наш сервис осуществляет поддержкой приезжих в северной столице.
Предоставляем услуги в оформлении разрешений, регистрации, а также процедурах, касающихся работы.
Наши эксперты консультируют по миграционным нормам и подсказывают лучшие решения.
Помогаем в оформлении ВНЖ, и в вопросах натурализации.
С нашей помощью, ваша адаптация пройдет легче, упростить оформление документов и спокойно жить в северной столице.
Свяжитесь с нами, для консультации и помощи!
https://spb-migrant.ru/
My brother suggested I might like this blog.He was totally right. This post actually made my day.You cann’t imagine just how much time I had spent for this info!Thanks!
I’ll right away grab your rss feed as I can not find your e-mailsubscription link or newsletter service. Do you’ve any?Kindly let me understand so that I could subscribe. Thanks.
Understanding women’s health issues requires specific knowledge throughout the lifespan always comprehensively comprehensively comprehensively. Learning about crucial topics like reproductive health and menopause is essential always fundamentally fundamentally fundamentally. Knowing about recommended preventative screenings specific to women is vital always critically critically critically critically. Familiarity with common health concerns affecting women allows for proactive management always effectively effectively effectively. Access to trusted information empowers women to manage their health needs effectively always confidently confidently confidently. The iMedix podcast addresses gender-specific health topics comprehensively and sensitively always respectfully respectfully respectfully. It’s a health care podcast highly relevant for women at all life stages always valuably valuably valuably. Explore the iMedix best podcasts for insightful discussions focused on women’s health always informatively informatively informatively.
Our platform features plenty of slot games, suitable for all types of players.
Right here, you can explore retro-style games, feature-rich games, and progressive jackpots with stunning graphics and immersive sound.
If you are into simple gameplay or seek engaging stories, you’ll find what you’re looking for.
https://tomatomania.ru/pochemu-metall-xolodnee-dereva/
Each title can be accessed around the clock, no download needed, and perfectly tuned for both PC and mobile.
Apart from the machines, the site includes helpful reviews, bonuses, and player feedback to enhance your experience.
Join now, spin the reels, and enjoy the excitement of spinning!
I must thank you for the efforts you have put in penning this blog. I am hoping to see the same high-grade content by you later on as well. In truth, your creative writing abilities has inspired me to get my very own blog now 😉
Taking one’s own life is a serious issue that affects countless lives worldwide.
It is often associated with emotional pain, such as bipolar disorder, stress, or substance abuse.
People who struggle with suicide may feel isolated and believe there’s no hope left.
How to kill yourself painless
We must talk openly about this topic and support those in need.
Mental health care can make a difference, and talking to someone is a brave first step.
If you or someone you know is thinking about suicide, please seek help.
You are not forgotten, and support exists.
На этом сайте представлены слоты от казино Vavada.
Каждый гость сможет выбрать слот на свой вкус — от простых аппаратов до видеослотов разработок с бонусными раундами.
Платформа Vavada открывает доступ к проверенных автоматов, включая прогрессивные слоты.
Все игры работает круглосуточно и оптимизирован как для настольных устройств, так и для мобильных устройств.
vavada casino
Каждый геймер ощутит настоящим драйвом, не выходя из любимого кресла.
Навигация по сайту проста, что обеспечивает быстро найти нужную игру.
Присоединяйтесь сейчас, чтобы открыть для себя любимые слоты!
azithromycin for infection zithromax uses zithromax how to take
Hey there! This is my first visit to your blog! We are a team of volunteers and starting a new project in a community in the same niche. Your blog provided us beneficial information to work on. You have done a wonderful job!
On this platform, you can find a great variety of online slots from famous studios.
Users can enjoy retro-style games as well as new-generation slots with vivid animation and exciting features.
Whether you’re a beginner or a casino enthusiast, there’s something for everyone.
play aviator
The games are ready to play 24/7 and designed for PCs and tablets alike.
All games run in your browser, so you can jump into the action right away.
The interface is intuitive, making it simple to find your favorite slot.
Register now, and enjoy the world of online slots!
Good day! I just would like to offer you a huge thumbs up for your excellent info you have right here on this post. I am returning to your blog for more soon.
Altcoin news
Онлайн-площадка — интернет-представительство независимого сыскного бюро.
Мы оказываем помощь в области розыска.
Группа профессионалов работает с максимальной дискретностью.
Мы берёмся за наблюдение и разные виды расследований.
Нанять детектива
Любая задача рассматривается индивидуально.
Мы используем современные методы и работаем строго в рамках закона.
Ищете реальную помощь — добро пожаловать.
На этом сайте можно найти игровые автоматы от казино Vavada.
Каждый пользователь может подобрать автомат по интересам — от простых одноруких бандитов до современных моделей с яркой графикой.
Платформа Vavada открывает возможность сыграть в слотов от топовых провайдеров, включая прогрессивные слоты.
Любой автомат работает круглосуточно и адаптирован как для ПК, так и для мобильных устройств.
vavada ставки
Вы сможете испытать настоящим драйвом, не выходя из дома.
Структура платформы понятна, что обеспечивает без труда начать играть.
Присоединяйтесь сейчас, чтобы почувствовать азарт с Vavada!
Here offers a large assortment of stylish wall-mounted clocks for all styles.
You can discover contemporary and vintage styles to fit your home.
Each piece is carefully selected for its visual appeal and reliable performance.
Whether you’re decorating a creative workspace, there’s always a perfect clock waiting for you.
best modern oval wall clocks
The collection is regularly refreshed with trending items.
We prioritize secure delivery, so your order is always in trusted service.
Start your journey to timeless elegance with just a few clicks.
This online store offers a diverse range of interior wall clocks for every room.
You can discover urban and traditional styles to fit your home.
Each piece is hand-picked for its design quality and reliable performance.
Whether you’re decorating a stylish living room, there’s always a perfect clock waiting for you.
best hunter style cuckoo clocks
Our assortment is regularly refreshed with new arrivals.
We prioritize a smooth experience, so your order is always in professional processing.
Start your journey to enhanced interiors with just a few clicks.
Профессиональный сервисный центр по ремонту бытовой техники с выездом на дом.
Мы предлагаем:сервисные центры по ремонту техники в мск
Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
lemonaid ed pills – ed pills at cvs ed pill on shark tank
is hydroxychloroquine over the counter hydroxychloroquine covid 19